The human hand is a wonder of nature. It’s strong enough to break someone’s nose but gentle enough to pick it. In turn, roboticists have often used the human hand as the core inspiration of design when building robotic arms. The problem is that these soft-tipped robot hands lack the surface area, and often strength, to grip all that well. But a new project out of MIT and Harvard imagines a better robotic hand–one with no hand at all.
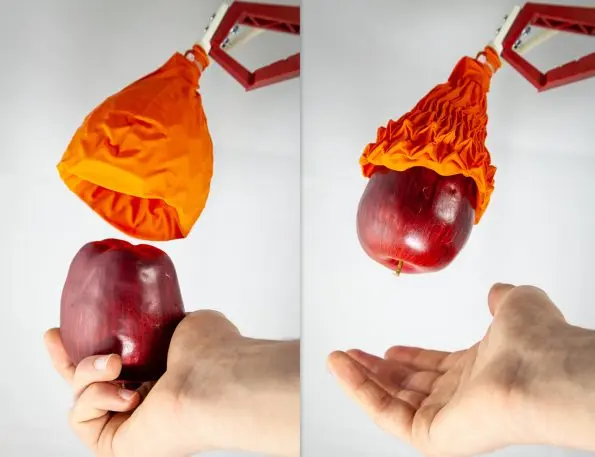
Instead of human fingers, it’s modeled after a Venus flytrap and one very clever origami project. Dubbed the Magic Ball, it’s a rubber and plastic structure that can contract around an object like an origami flower. The soft skeleton inside requires only a simple vacuum to contract like a muscle, while the flexible shape is capable of wrapping itself around a diverse array of objects, including hammers, soup cans, and broccoli. And it’s strong–capable of lifting 100 times its own weight. To put that power to weight ratio into perspective, a Magic Ball gripper with the weight of a pencil could feasibly lift a 2-liter of soda.
The researchers believe this strength will scale, and would like to test a larger version of the Magic Ball that can literally lift a small person (presumably not by their head).
But the moonshot goal of the project was, and still is, something deceptively simple: to develop a robotic hand that could bag groceries. “I’m interested in groceries because they’re very challenging to manipulate. Groceries have irregular shapes, and they’re delicate and heavy,” says MIT professor Daniela Rus, director of MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL). “Our aspiration of having robots in human environments, helping with all sorts of physical tasks, benefits from being able to handle things like groceries.” On top of that, Rus imagines there could be many commercial applications for robots handling groceries in warehouses.
The gripper isn’t good at everything, since its design is really intended to maximize gripping surface area across 3D objects. So while heavy cylinders are a cinch to lift, it has a more difficult time with flat objects, like books. But Rus suggests that robotic hands don’t have to be of a one-size-fits-all design. They could be swapped.
Besides, the Magic Ball has other advantages–namely, price. While Rus refused to speculate on what it would actually cost to manufacture, the gripper can already be produced in a lab pretty easily with a 3D-printed mold. The gripper’s plastic and rubber assembly requires no metal, either, so its source materials are cheap. Injection molding small objects, at scale, verges on free once you’ve paid the initial five-figure costs for the molds themselves.
But whether or not the Magic Ball has a future in warehouses, it’s an important reminder that, while the human body is an incredible feat of evolution, the most useful robots of tomorrow might not be anthropomorphic at all.
“A broader motivation for me is I’d like to explore a new era of robots where we get the Cambrian Explosion of sorts in the types of shapes and materials robots are made of,” says Rus. “Nature has so many more shapes, and the built environment has so many more shapes, and so it’s interesting to think about the possibilities.”
Recognize your brand’s excellence by applying to this year’s Brands That Matter Awards before the early-rate deadline, May 3.
